


Design of virtual training platform for construction machinery based on Stewart
-
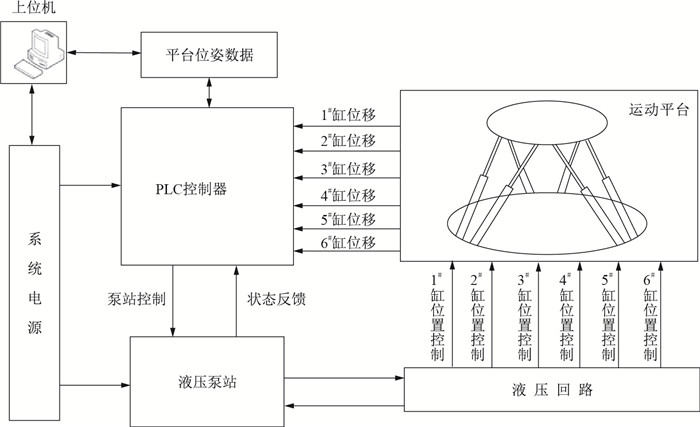
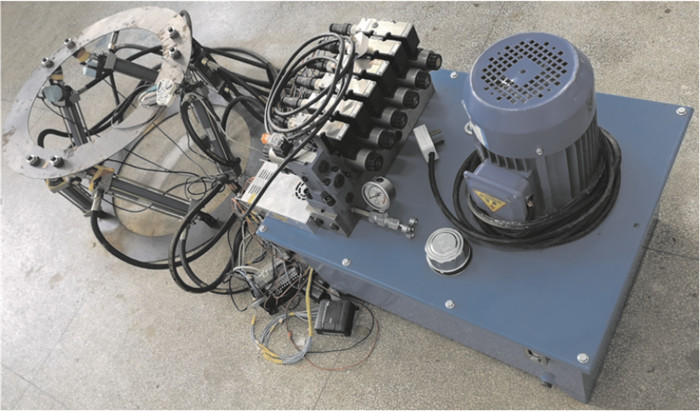
摘要: 为增强工程机械虚拟实训沉浸效果,设计一套六自由度座椅平台。该平台以Stewart六自由度机构为基础,包括并联运动机构、液压泵站和PLC控制系统。由工程机械驾驶特点确定运动平台位姿参数,与MATLAB建立的上位机软件进行数据交互;经过运动学反解计算各根液压缸杆长变化值,PLC控制器对指令处理并发送命令来控制电液比例阀流量,驱动6根并联的液压缸伸缩,从而使运动平台呈现不同的位置姿态。基于上述原理,搭建实物平台并依据驾驶特点进行测试。结果表明,该平台可以模拟工程机械的在不同工况下的姿态,提高虚拟实训人员的沉浸感。Abstract: In order to enhance the virtual training immersion effect of construction machinery, a six-degree-of-freedom(6-DOF) seat platform is developed based on Stewart 6-DOF mechanism, including a parallel motion mechanism, a hydraulic pump station, and a PLC control system. The positional parameters of the motion platform are determined by the driving characteristics of the construction machinery, and the data interaction that conducted with the upper computer software is established by MATLAB. After the kinematics inverse solution is calculated, the length change value of each hydraulic cylinder is obtained. The PLC controller processes the instructions and sends the commands to control the flow of the electro-hydraulic proportional valve, and drive the six parallel hydraulic cylinders to expand, so that the moving platform presents different position and posture. Based on the above principles, a physical platform is built and tested according to the driving characteristics. The test results show that the platform could simulate the posture of construction machinery under different working conditions, so as to improve the immersion of virtual trainers.
-
Key words:
- construction machinery /
- virtual training /
- Stewart platform /
- PLC
-

图 3 绕x′轴旋转位移(a)和速度(b)仿真曲线
Figure 3. Simulation curve of displacement (a) and speed (b) around x′-axis

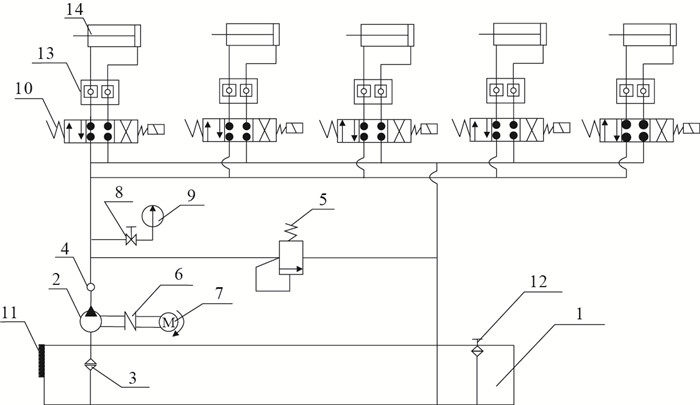
图 4 液压系统原理图
1.油箱;2.齿轮泵;3.吸油过滤器;4.单向阀;5.溢流阀;6.联轴器;7.电机;8.单向阀;9.压力表;10.电液比例阀;11.液位计;12.空气过滤器;13.叠加式液控单向阀;14.液压缸
Figure 4. Schematic diagram of hydraulic system
表 1 单自由度运动参数要求
Table 1. Movement requirements of single DOF
运动方式 范围 最大速度 前后 ±100 mm 50 mm/s 左右 ±100 mm 50 mm/s 上下 ±100 mm 70 mm/s 俯仰 ±20° 15°/s 侧翻 ±20° 15°/s 扭转 ±15° 10°/s  下载: 导出CSV
下载: 导出CSV
-
[1] 袁玉石, 苗红昌, 张志强, 等.水平定向钻在南水北调配套工程输水管线穿越中的应用研究:以沙颍河穿越工程为例[J].地质科技情报, 2016, 35(4):208-212. http://www.cqvip.com/QK/93477A/20164/669489719.html [2] 朱江龙, 刘跃进, 潘飞, 等.我国深孔钻探装备的发展与展望[J].地质装备, 2013, 14(6):9-14. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=dzzb201306002 [3] 吴金栋, 任光辉, 黄东键, 等.基于虚拟仿真技术开展实践教学改革的研究与实践[J].实验室研究与探索, 2018, 37(5):240-244. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=sysyjyts201805057 [4] 田宜平, 毛小平, 张志庭, 等."玻璃油田"建设与油气勘探开发信息化[J].地质科技情报, 2012, 31(6):16-22. http://www.cnki.com.cn/Article/CJFDTotal-DZKQ201206004.htm [5] Bertram J, Moskaliuk J, Cress U.Virtual training:Making reality work?[J].Computers in Human Behavior, 2015, 43:284-292. doi: 10.1016/j.chb.2014.10.032 [6] 胡自飞, 文国军, 王玉丹, 等.基于Unity3D的岩心钻机虚拟实训系统设计[J].地质科技通报, 2020, 39(3):222-226. http://dzkjqb.cug.edu.cn/CN/abstract/abstract10041.shtml [7] 张鹏飞, 魏培静, 田德宝, 等.石油钻机集成控制虚拟仿真培训系统的研制[J].石油机械, 2017, 45(1):1-5. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=syjx201701001 [8] Wang J, Wen G, Liu J, et al.Updated VR-Based HDD rig operating training system[C].International Conference on Pipelines & Trenchless Technology.Xi'an 2013: 1098-1107. [9] 赵沁平.虚拟现实综述[J].中国科学:信息科学, 2009, 39(1):2-46. [10] Osterlund J, Lawrence B.Virtual reality:Avatars in human spaceflight training[J].Acta Astronautica, 2012, 71:139-150. doi: 10.1016/j.actaastro.2011.08.011 [11] Davliakos I, Papadopoulos E.A model-based impedance control of a 6-dof electrohydraulic stewart platform[J].Mechanism and Machine Theory, 2008, 43:1385-1400. doi: 10.1016/j.mechmachtheory.2007.12.002 [12] 杨宇.飞行模拟器动感模拟关键技术研究[D].哈尔滨: 哈尔滨工业大学, 2010: 5-10. [13] Mirza M A, Li S, Jin L.Simultaneous learning and control of parallel stewart platforms with unknown parameters[J].Neurocomputing, 2017, 266:114-122. doi: 10.1016/j.neucom.2017.05.026 [14] 王军, 魏来生, 兰小平.驾驶员-履带车辆-路面系统的建模与仿真[J].计算机集成制造系统, 2003, 9(增刊1):108-111. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jsjjczzxt2003z1022 [15] Moohyun C, Soonhung H, Jaikyung L, et al.A virtual reality based fire training simulator integrated with fire dynamics data[J].Fire Safety Journal, 2012, 50:12-24. doi: 10.1016/j.firesaf.2012.01.004 [16] 段秀兵, 朱诗顺.工程机械驾驶模拟器运动平台多体动力学分析[J].中国机械工程学报, 2011, 9(4):448-451. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zggcjxxb201104014 [17] Fichter E F.A atewart platform-based manipulator:General theory and practical construction[J].The International Journal of Robotics Research, 1986, 5(2):157-182. doi: 10.1177/027836498600500216 [18] Stoughton R S.A modified stewart platform manipulator with improved dexterity[J].IEEE Transaction on Robotics and Automation, 1993, 9(2):166-173. doi: 10.1109/70.238280 [19] 周亚超.并联式六自由度液压运动平台的分析与研究[D].合肥: 合肥工业大学, 2015: 23-25. [20] 叶永祥, 张旭宁.基于欧姆龙PLC的PID调节[J].自动化技术与应用, 2009, 28(7):71-74. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=hljzdhjsyyy200907021 [21] Shukla A, Karki H.Modeling simulation & control of 6-DOF Parallel Manipulator using PID controller and compensator[J].IFAC Proceedings Volumes, 2014, 47(1):421-428. doi: 10.3182/20140313-3-IN-3024.00015 -

 下载:
下载:



 点击查看大图
点击查看大图
图(8) / 表(1)
计量
- 文章访问数: 363
- PDF下载量: 358
- 被引次数: 0
